GNSS Attitude Determination and Precise Positioning
Overview
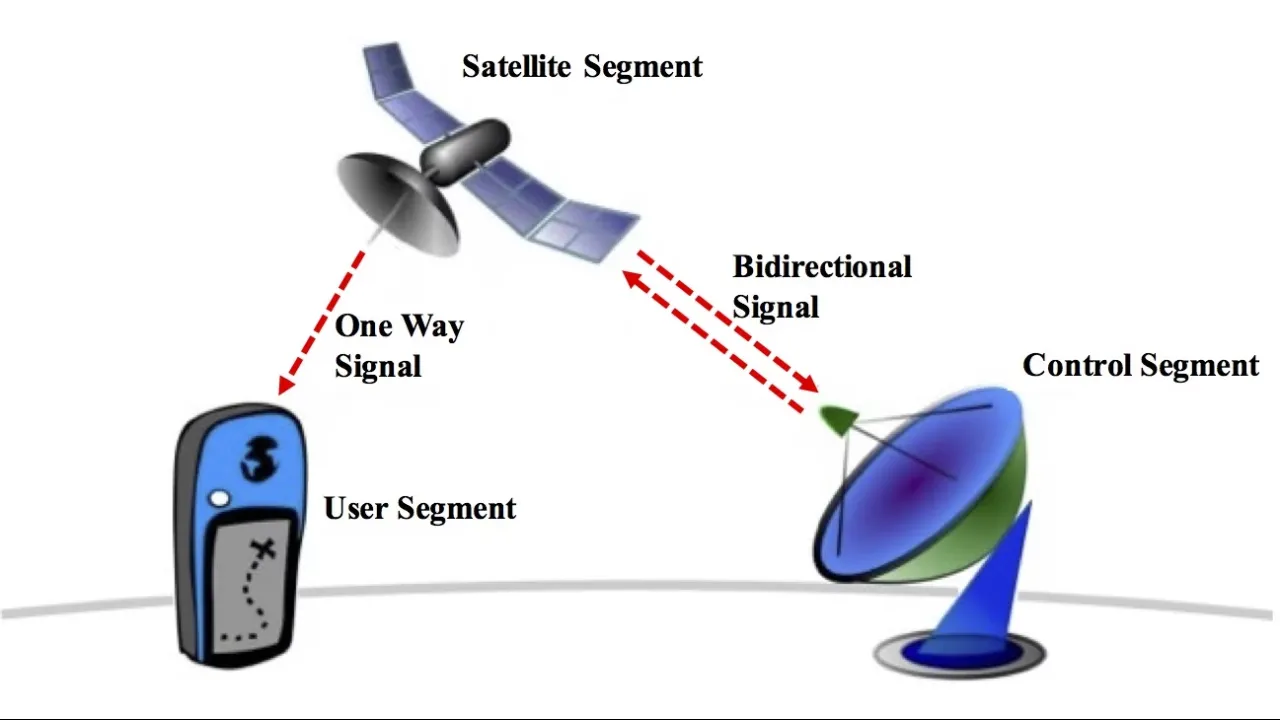
Global Navigation Satellite Systems (GNSS), including GPS, GLONASS, Galileo or BeiDou, are used in many applications, most notably tracking the position and attitude (or orientation) of a vehicle or any moving platform. The advances in automated driving systems have recently reignited interest in GNSS positioning and attitude determination.
The goal of this research project is to develop accurate real-time techniques for GNSS positioning and attitude determination. Our current and future research in this area focuses on three main areas
1) Attitude Determination;
2) Precise real-time positioning;
3) Utilization of GNSS attitude and positioning info for driver and road condition monitoring.
Attitude Determination
A platform attitude, defined as the orientation of the platform’s body frame relative to a reference frame, is usually achieved by the multiple GNSS. It is usually represented using Euler angles (yaw, pitch, and roll) in the selected coordinate, for instance, East- North-Down (END) frame or East- North-Up (ENU) frame. The 3-D attitude can be measured by three or more non-collinear GNSS antennas firmly mounted on the moving vehicle. This problem has attracted the attention of many researchers due to its apparent commercial potential, particularly in autonomous driving.

Fig. 1. East-North-Down frame

Fig. 2. Attitude represented by Euler angles
Attitude determination is an important application of Global Navigation Satellite Systems (GNSS). However, before GNSS attitude determination can be achieved, the carrier-phase integer ambiguity must be resolved. This work focuses on developing efficient methods to solve the ambiguity resolution and attitude determination problems jointly. In particular, we target
1) Ambiguity resolution methods utilizing the receiver configuration;
2) Ambiguity resolution methods exploiting frequency diversity;
3) Novel optimization techniques to leverage baseline information;
4) Performance analysis of the different methods.
Real-time Kinematic (RTK) Positioning
Real-time kinematic (RTK) positioning is an important technology for many emerging applications, particularly for autonomous outdoor robots and autonomous vehicles. RTK is capable of delivering centimeter-level position accuracy of a rover by utilizing correction data received from a GNSS base station deployed at a fixed nearby location. In order to provide real-time solutions, the correction information has to be received in a timely manner via some sort of communication link between the rover and the base station. The performance of RTK positioning depends, among other things, on the quality of the correction data received by the rover. Another important factor that affects RTK positioning performance is the delay of the communication link between the rover and the base station.

Fig. 3. RTK system structure and observation model.
In this work, we deploy and test a GNSS system for RTK positioning. The research activities related to this project include:
1) Test and evaluate different RTK positioning algorithms under different communication network conditions;
2) Develop RTK algorithms that are less sensitive to network delays;
3) Develop algorithms for improving positioning performance in urban canyon situations;
4) Develop algorithms for sensor fusion of GNSS, IMU, etc.
Machine Learning Applications in GNSS Precise Positioning and Attitude Determination
1) Driver Behavior Detection and Profiling
GNSS precise position and attitude data can provide an invaluable source of information that can be used to categorize the driver behavior and profile drivers, for example, insurance and traffic violation record purposes. The drivers can be classified as careful, careless, skillful, etc., based on patterns extracted from their vehicle position and attitude data. The same data can also be utilized for detecting driving anomalies such as sleep, intoxication, talking on the phone, texting, etc.
2) Road Condition Monitoring
GNSS precise position and attitude data can be processed to create an image of how things go on roads, hence providing a great source of information regarding road conditions. The data can be used as a basis to detect road defects and dangerous conditions such as bumps and holes, making road quality monitoring a continuous and collaborative process. Further, position and attitude data can be useful in evaluating traffic sign and road design effectiveness. The data acts as automatic feedback from the drivers reflecting how they feel at each point of their journeys through urban, national, or international road networks.
Related People


Xing Liu
- Postdoctoral Research Fellow, Electrical and Computer Engineering

Tarig Ballal Khidir Ahmed
- Research Scientist, Electrical and Computer Engineering
image processing acoustic signal detection Digital signal processing low complexity systems Low sampling Ultra-wideband communication UWB channel impulse response estimation. Acoustic sensing and communications Sonars and radars. Movement detection and tracking using RF and acoustic waves. Respiration detection and tracking. Robust estimation and regularization Experimentation and testing.