Underwater and Underground Communications and Localization
Overview
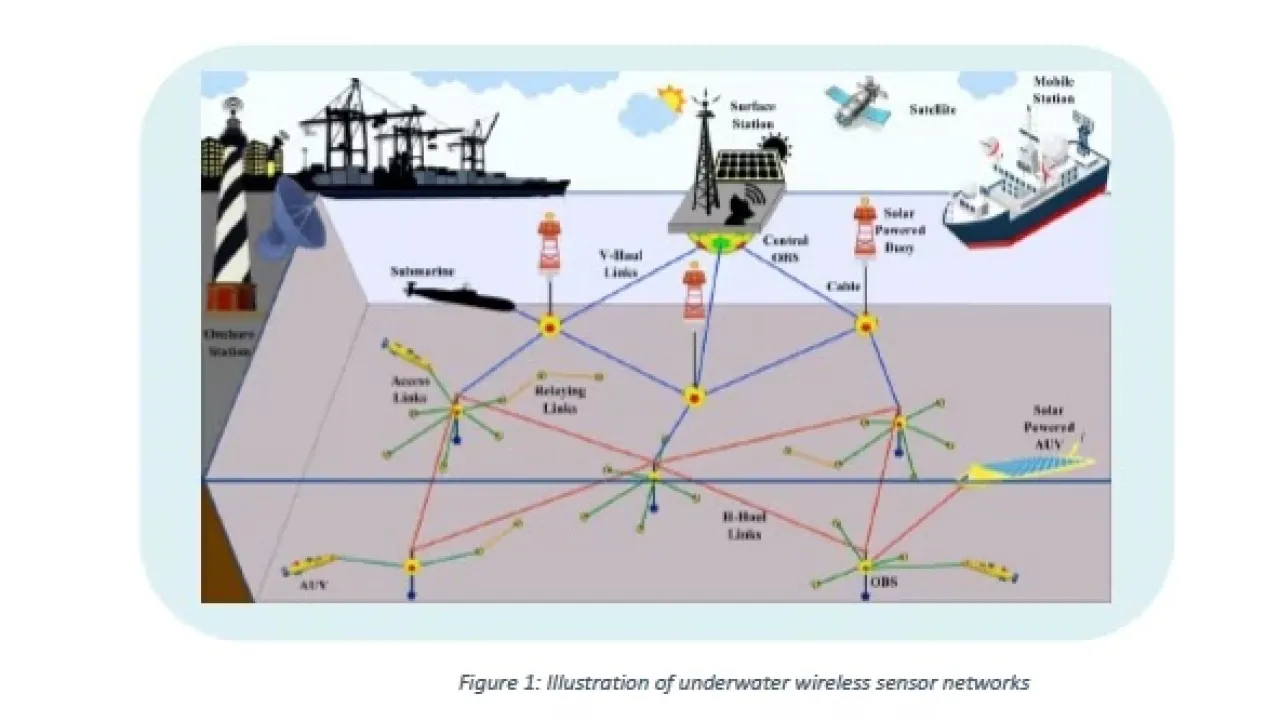
Oceans, which occupy 97% of planet Earth surface, produce numerous benefits to humankind, e.g., food supply, climate regulation, recreation, transportation, and medicine. Nevertheless, 95% of oceans remains unexplored, which necessitates deploying underwater wireless sensor networks (UWSNs), as a means to explore oceans and reserve their bio-diversity. Fig. 1 shows illustrates an example of UWSN consisting of underwater sensor nodes, autonomous underwater vehicles (AUVs), submarines, and underwater base stations. UWSNs have the valuable capabilities of enhancing diverse applications such as offshore and ocean sampling, ocean exploration, navigation, recreation, surveillance, and disaster management. Such applications need a proper choice of the underwater wireless communication technology, which provides the high data rate and low latency metrics. The nature of the underwater environments, however, enforces stringent challenges on the establishment of a real-time broadband wireless communication link. Acoustic waves support long communication ranges up to tens of Kilometers, with a restrained data rate performance and high latency induced by the low propagation speed. Similarly, RF waves are highly attenuative for underwater communications and bounded by the extremely low-frequency band, which imposes utilizing large antenna sizes. RF-based underwater communication systems, thus, do not provide high data rate services in practical UWSNs. Underwater optical wireless communication (UOWC) is an alternative approach to acoustic and RF for creating a reliable, real-time broadband link. Optical waves distinguishable feature is their high propagation speed and the ability to support broadband communication, even in the presence of high absorption and scattering. Currently, we are working on developing robust and accurate three-dimensional localization techniques and routing protocols for underwater optical wireless sensor networks. This work has led to various well-reputed conference and journal publications -. The following summarizes each of these contributions separately.
1.1 Connectivity and Localization in Multi-Hop Underwater Optical Wireless Sensor Networks
Here, a stochastic network connectivity analysis is developed based on the network parameters of multihop UOWSNs . Unlike the symmetrical bi-directional graphs of traditional sensor networks, we model UOWSNs as unidirectional random graphs where coverage region of an optical transmitter node is angular-sector shaped as shown in Fig. 2.
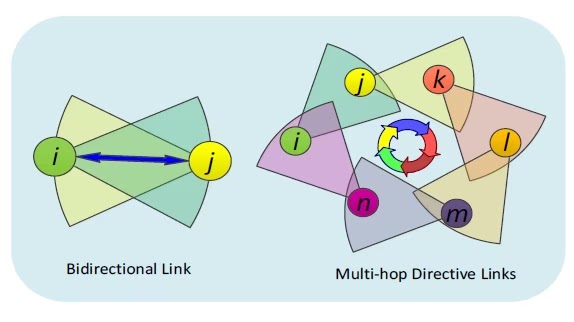
Figure 2: Type of connectivity in directed graphs.
Furthermore, localization of multi-hop UOWSNs is formulated as an unconstrained optimization problem and solved using the conjugate gradient technique. We also evaluate the impact of connectivity, ranging error, and the number of anchors on the performance of the proposed localization technique. We have discovered that increasing the beam-width and transmission range of the sensor nodes improves the network connectivity as shown in Fig. 3.

Figure 3: Connectivity improves with increase in beam-width and transmission range of the sensor nodes.
1.2 Outlier Detection and Anchor Placement for 3D UOWSNs Localization
In our previous works, we have proposed a two-dimensional localization techniques to find the location of underwater sensors by using optical waves. The nature of the underwater environment however is three-dimensional which requires localization techniques in three dimensional space. Therefore, in , , we extend the work - summarized above to the 3-dimensional case. The work here is also more practical in that it addresses the issue of range measurement outliers that results from underwater optical channel impairments (e.g., absorption, scattering, turbulence, and air bubbles). Accurate matrix completion strategy is used to estimate the missing distances as shown in Fig. 4.
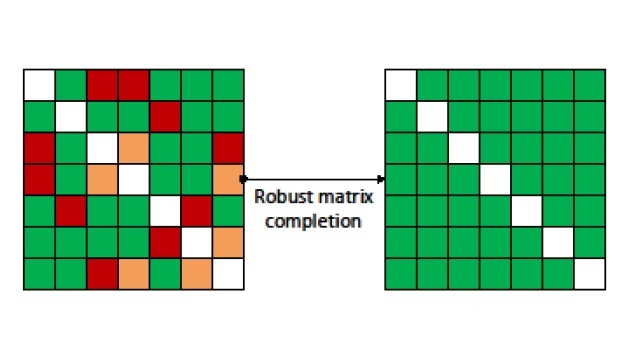
Figure 4: Matrix completion strategy. On the left, green, red, and orange entries represent the available pairwise distances, missing distances, and outliers, respectively. On the right side matrix is completed and outliers are removed.
Fig. 5 shows that the proposed method performs well in the presence of outliers. Finally, every location finding method needs few nodes with known positions (anchors) whose positions play an important role in underwater WSN's. So in , an optimal anchor placement strategy is introduced to reduce the overall localization error.
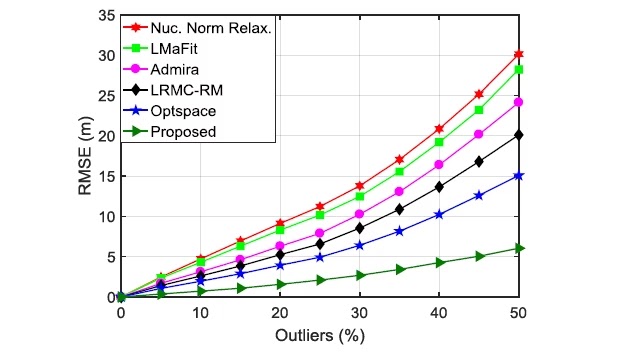
Figure 5: Outliers versus RMSE
That said, the underwater environment is dynamic in nature and so it inevitably causes the anchors to drift from their actual positions and so we develop in localization techniques that are robust to anchor position uncertainty.
1.3 Energy Harvesting Hybrid Acoustic-Optical UWSNs Localization
In -, we have proposed a hybrid solution to overcome the low data rate of acoustic waves, the limited communication distance of optical waves, and the limited energy resources of an underwater sensor network . Specifically, we propose a muti-source energy harvesting system that harvests energy from multiple underwater sources such as acoustic resonators and microbial fuel cells. Here nodes harvest and store ambient renewable energy sources and individually optimize their duty cycles as shown in Fig. 6, to achieve maximum throughput , .
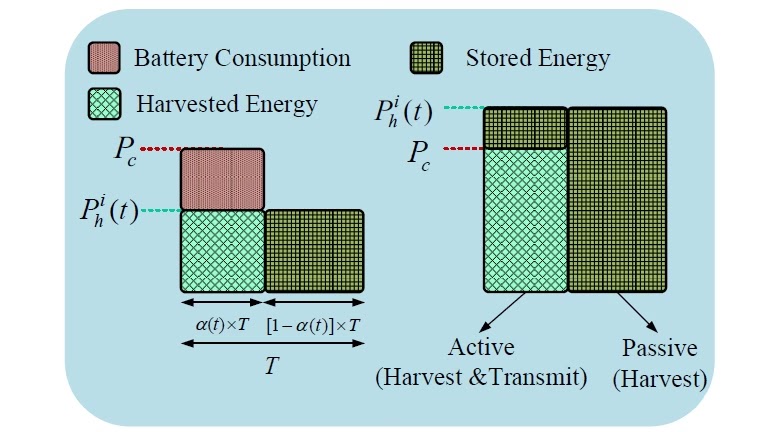
Figure 6: Illustration of the time-slotted operation of sensor nodes.
We have shown that energy arrival rates play a critical role in network connectivity since it primarily determines the number of active sensors and thus the degree of network connectivity. Therefore, localization accuracy improves with the increase in energy arrival rate as shown in Fig. 7.

Finally, a hybrid received signal strength (RSS) based localization technique is proposed to localize the nodes in the network. The proposed technique combines the noisy RSS based measurements from acoustic communication and optical communication and estimates the final locations of acoustic-optical sensor nodes . A weighted multiple observations paradigm is proposed for hybrid estimated distances to suppress the noisy observations and give more importance to the accurate observations.
1.4 Future Research Work:
The future work consists of developing ultra-reliable low latency routing protocols for UOWSNs and Magnetic induction-based underground wireless sensor networks localization.
Routing for UOWSNs
Since most of the research efforts on UOWCs are directed towards overcoming physical layer issues, research topics on networking layers emerge as an interesting research area. Only a few works focus on this aspect. Further investigation in this area can be quite beneficial to the UOWSNs research since most of the real-time applications necessitate efficient and reliable networking. Future research works also need to investigate the effect of other underwater channel impairments such as turbulence, salinity, and air-bubbles on the existing routing protocols.
MI-based Underground Wireless Sensor Networks Localization for Oil and Gas Industry
One of the primary challenges of the underground oil and gas reservoirs is to obtain their real-time information. This challenge can be addressed by using underground wireless sensor networks (UWSNs) which can optimize the production of oil and gas, monitor the flow of oil and gas, and can monitor the reservoir. The challenging underground environment prevents the use of conventional terrestrial wireless communication systems. Therefore, magnetic-induction (MI) has emerged as a promising wireless communication technology to develop practical UWSNs. The existing works do not characterize the achievable accuracy of the developed MI-based localization techniques for UWSNs which is a crucial and challenging task. In the past, the estimation bounds for the time of arrival, the angle of arrival, time difference of arrival, and received signal strength based localization techniques have been investigated. Subsequently, these findings have opened the door for developing accurate and robust localization algorithms. Therefore, we expect the same for our proposed lower bound for MI-based UWSNs . Furthermore, the impact of anchor placement and geometry of the network also need to be investigated. We would like to develop estimation bounds for MI-based localization. We don't have much freedom in anchor placement as in other environments and so we intend to study the impact of anchor placement and geometry of the network on the localization performance.
References
N. Saeed, A. Celik, S. Alouini, and T. Y. Al-Naffouri, “Performance analysisof connectivity and localization in multi-hop underwater optical wireless sensor networks", IEEE Transactions on Mobile Computing, pp. 1-1, 2018, issn:1536-1233. doi: 10.1109/TMC.2018.2878672.
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M. Alouini, “Connectivity analysis of underwater optical wireless sensor networks: A graph theoretic approach", in 2018 IEEE International Conference on Communications Workshops (ICC Workshops), May 2018, pp. 1-6. doi: 10.1109/ICCW.2018.8403740.
A. Celik, N. Saeed, T. Y. Al-Naffouri, and M. Alouini, “Modeling and performance analysis of multihop underwater optical wireless sensor networks", in 2018 IEEE Wireless Communications and Networking Conference (WCNC), Apr. 2018, pp. 1{6. doi: 10.1109/WCNC.2018.8377388.
N. Saeed, T. Y. Al-Naffouri, and M.-S. Alouini, “Outlier detection and optimal anchor placement for 3d underwater optical wireless sensor networks localization", in IEEE Transactions on Communications, vol. 67, no. 1, pp. 611-622, Jan. 2019.
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M. Alouini, “Robust 3d localization of underwater optical wireless sensor networks via low rank matrix completion", in 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Jun. 2018, pp. 1-5. doi: 10.1109/SPAWC.2018.8445953.
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M.-S. Alouini, “Energy harvesting hybrid acoustic-optical underwater wireless sensor networks localization", Sensors, vol. 18, pp. 01-25, 2018. doi: 10.3390/s18010051.
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M. Alouini, “Underwater optical sensor networks localization with limited connectivity", in 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Apr. 2018, pp. 3804{3808. doi: 10.1109/ICASSP.2018.8461567.
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M.-S. Alouini, “Localization of energy harvesting empowered underwater optical wireless sensor networks", IEEE Transactions on Wireless Communications, vol. 18, no. 5, pp. 2652-2663, May 2019.
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M.-S. Alouini, “Analysis of 3d underwater optical wireless sensor networks localization with uncertain anchor positions", IEEE Communications Letters, Under revision, 2018.
N. Saeed, T. Y. Al-naffouri, and M.-S. Alouini, “3D localization of magnetic-induction based internet of underground things", IEEE Access, Under revision, 2019.